
Go Simulation!の特長
Go Simulation!でできること
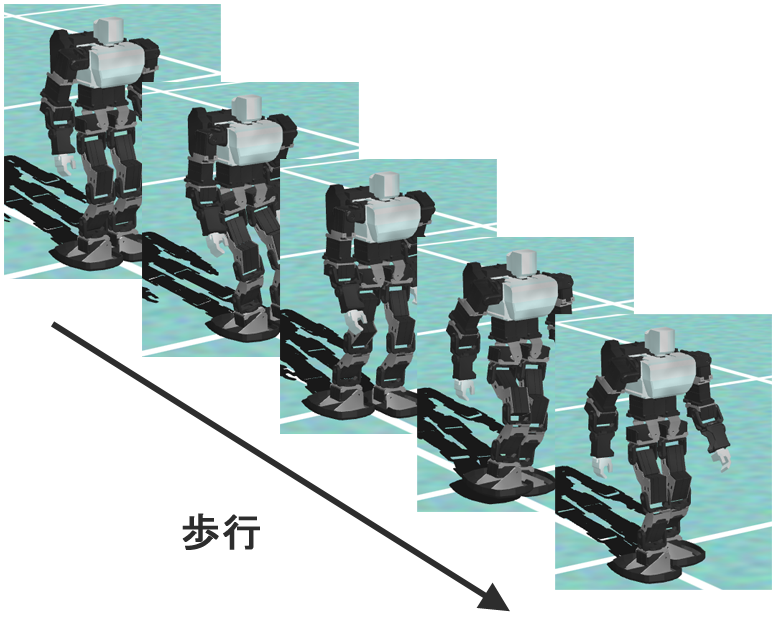
Go Simulation!は三次元の物理演算シミュレータです。
一部分ではなく全身の三次元物理演算で歩行シミュレーションなど可能です。
ゲームモードもついておりますので、プロの方はもちろん、アマチュアの方にも
楽しんで頂けるソフトとなっております。
定価
税込6,690円
1ライセンスで3台のPCまでインストール(アクティベーション)可能です。
Go Simulation!の特長
【 特徴:1 三次元の全身物理演算 】
物理演算を行っていますので、物理的にリアルな動作をします。
従来のゲームには無い感覚を体験してください!
物理演算APIにはロボット系学会論文でも多く採用されている、ODE をベースにしています。
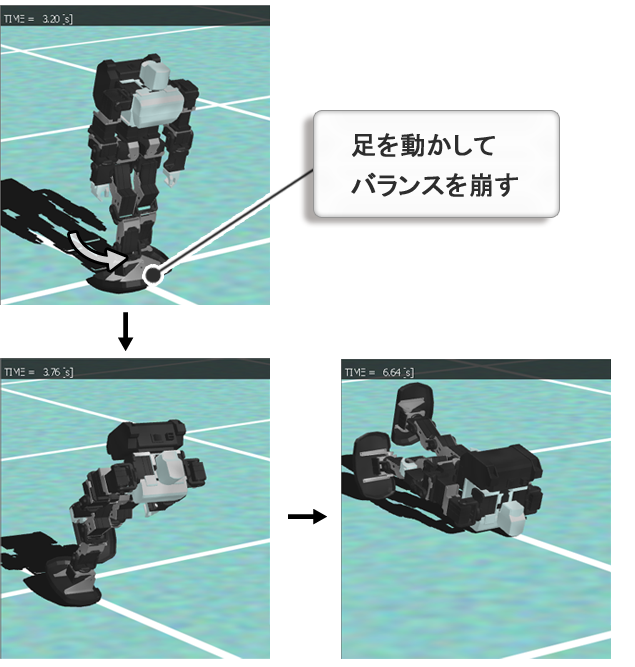
物理演算を行っているので、バランスの取れない姿勢にすると実際のロボットのようにリアルに倒れます。
【 特徴:2 簡単にモーション作成ができる 】
ロボットのポーズをタイムラインに並べていくだけで、簡単にロボットのモーションを作成できます。
上級者向けに、ロボットの行動制御をスクリプト言語で記述する機能もあります!
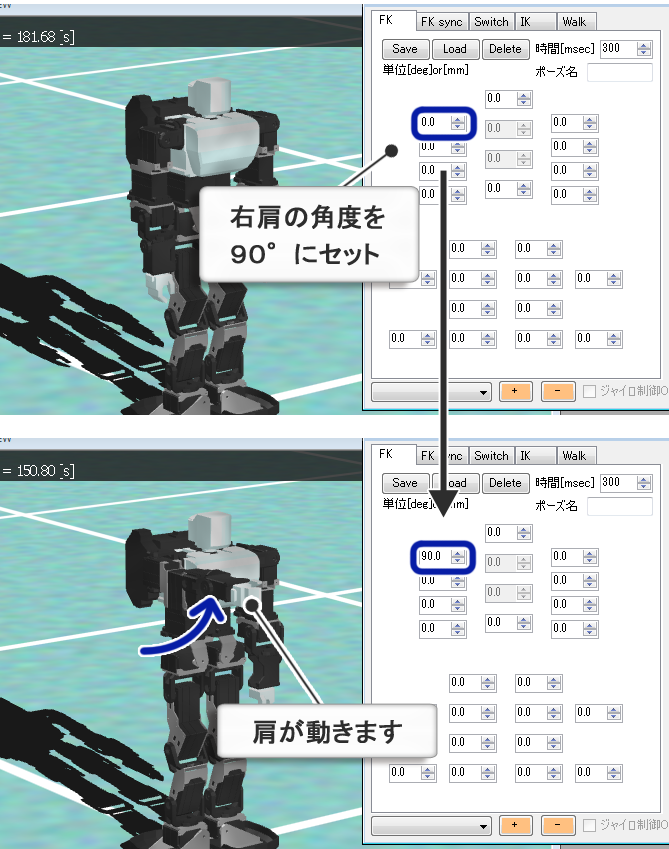
ロボットの動きはモーションエディタで作成可能です。
例えば、左図のように 数値を入力することにより、左肩を動かすことが出来ます。
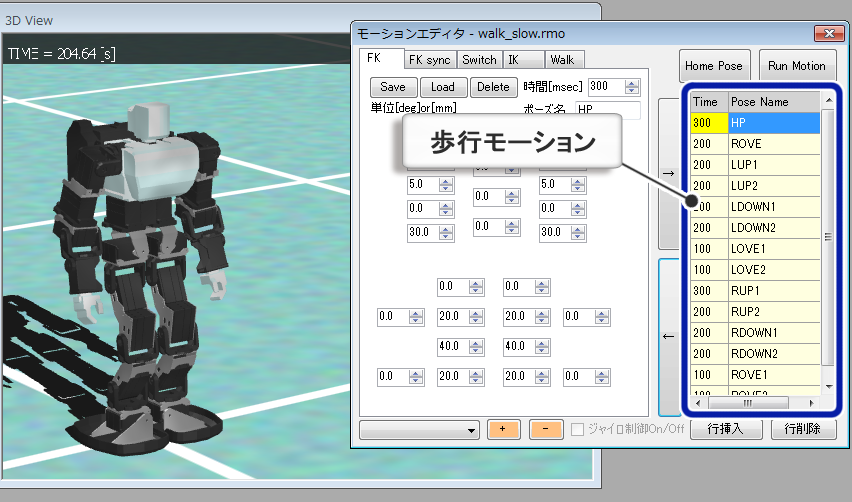
デフォルトでモーションをいくつか用意してありますので、 すぐに歩行モーションなどを確認できます。
もちろん、ユーザーがモーションを一から設計することもできるので、 攻撃や歩行、ダンスなど、様々な動きを作成可能です。
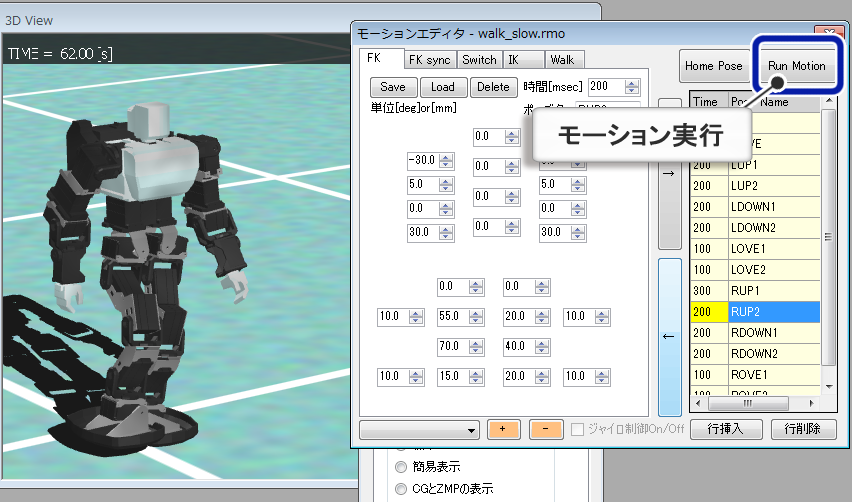
一連の動作をボタン一つで再生できます。
モーションを実行すると、左図のようにロボットが動きます。
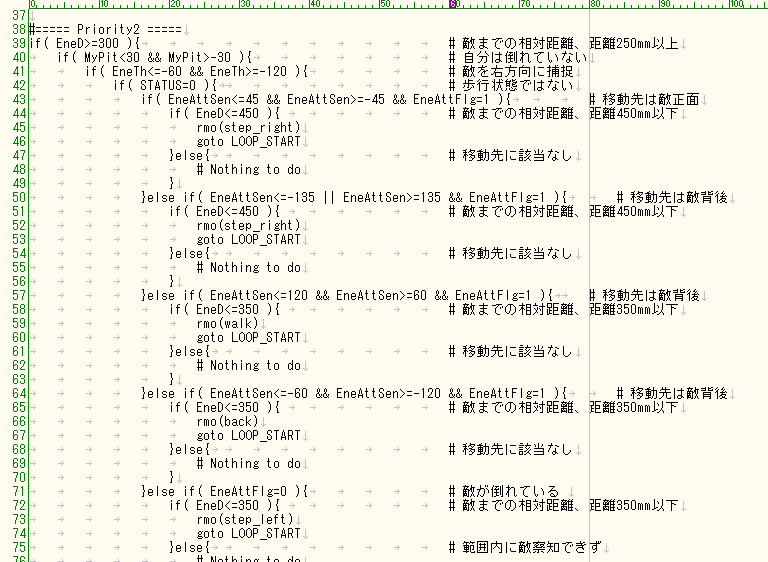
スクリプト機能もありますので、左図のようにAIのプログラムを作り込むことも可能です。
【 特徴:3 二足や多足、車輪型等様々なロボットを設計可能 】
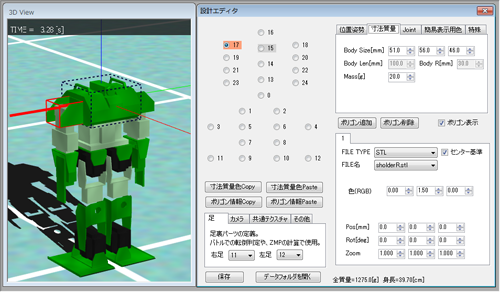
設計エディタでロボットの寸法・質量・関節・サーボモータなどを細かく設計できるので、実在のロボットやアニメのロボットなど、好きなロボットでシミュレーションを行うことができます!
3D CGソフトやCADで作成したロボットのポリゴンデータを取り込み可能です(STLファイル形式とXファイル形式の一部に対応)。
左図はロボット設計エディタで寸法・質量を設定しているところです。
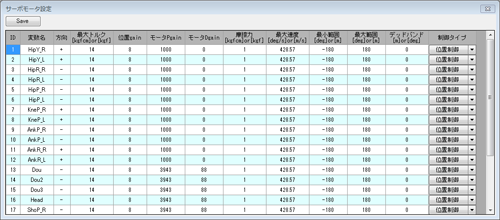
左図は各関節の力やトルクなどを設定しているところです。

このようにステージを設計することも可能です。

左図のようなカッコイイロボットのモデリングも可能です。
(画像提供「シミュ研!」)
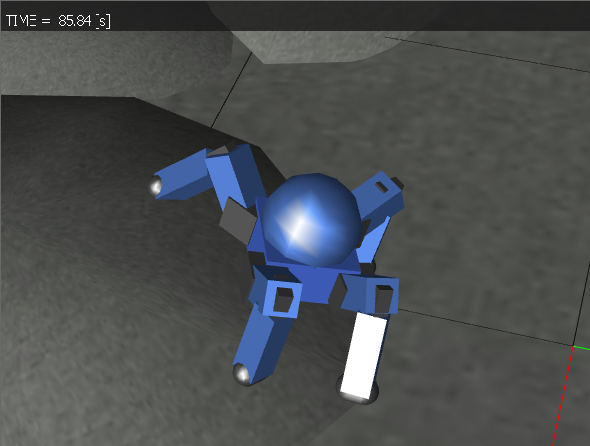
このような4足+車輪型のロボットもモデリング可能です。
【 特徴:4 ゲームモードですぐに遊べる! 】
ロボットのポーズをタイムラインに並べていくだけで、簡単にロボットのモーションを作成できます。
上級者向けに、ロボットの行動制御をスクリプト言語で記述する機能もあります!
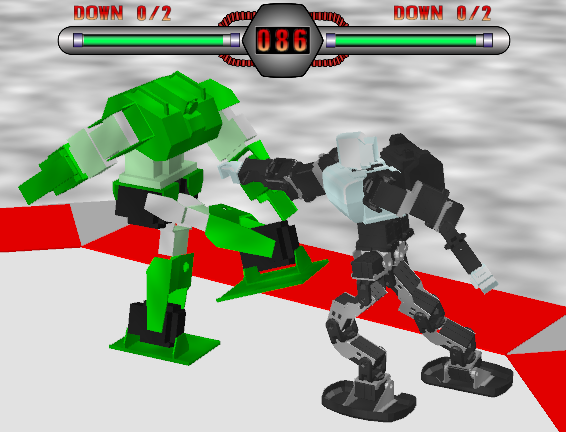
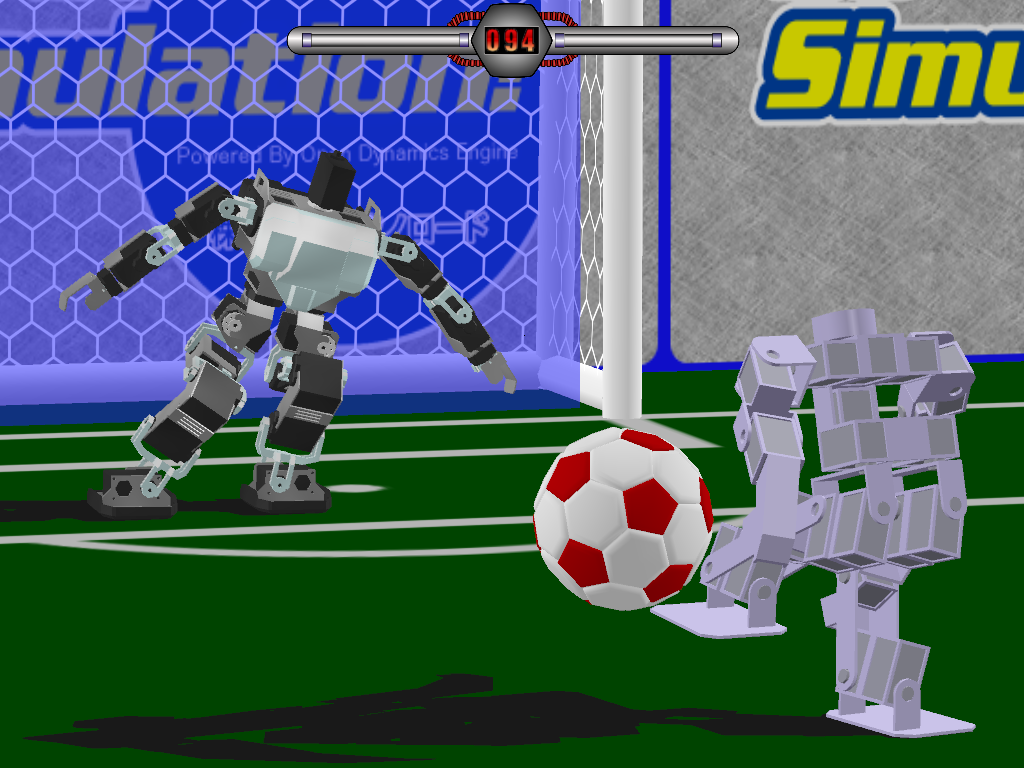
ゲームモードで、自分で設計したロボットやステージはもちろん、デフォルトで入っているモデルを使用してゲームができるので、インストール後すぐに遊び始めることができるのは「Go Simulation!」の大きな特徴の一つです。。

ロボット2台でのバトル対戦や、障害物コースを走るタイムトライアルで遊べます。
コントローラーを使って自分で操作することも、AIを作って動かすことも可能です。
【 特徴:5 工学 X ゲーム 】
ゲーム的な要素も取り込んでいますが、当ソフトはロボットの研究にも使えるような内容です。
ロボット制御の感覚を養えますので、教育的な効果も期待できます。
【 特徴:6 実際のロボットモデルの収録 】
市販されている二足歩行ロボットキットのモデルデータを付属。(実際の動きを完全に保証するものではありません。)
- 近藤科学製:KHR-3HV, KHR-2HV, KHR-1HV
- 株式会社エイチ・ピー・アイ・ジャパン製:G-ROBOTS
【 特徴:7 ROBO-ONE 】
二足歩行ロボット大会のROBO-ONE競技の、on PC(シミュレーション大会)等の
公式ソフトウェアとして採用されております。
【 特徴:8 ステージデータ 】
ステージもロボットと同様にカスタマイズ可能です(ステージもロボットの一種として扱えます)。
障害物を設置したり、動く壁を設置することも可能です。
【 特徴:9 様々なツール(カメラ・動画保存・ZMP表示) 】
シミュレーションに必要な様々ツールを用意しています。
カメラは通常の外部カメラの他に、ロボット搭載用カメラ視点も選択できます。ロボットに乗って操縦するような感覚も味わえます。
動画を無圧縮AVIファイル等に保存可能です。コーデックをインストールすることにより高性能圧縮のH.264やXdiv形式で保存することも出来ます。
ZMP(Zero Moment Point)と呼ばれる歩行時のバランス位置を表示することができます。
【 特徴:10 リアルタイム性 】
使用している物理演算APIのODEは、シミュレーションの正確さよりもリアルタイム性を重視した設計となっています。
そのため、本ソフトウェアは詳細な挙動を解析するより、環境も含めたシステム全体的シミュレーションをリアルタイムに行うのに適しています。
Core2DUOクラスでしたらロボット2体のバトルでもリアルタイム性を期待できます。
【 特徴:11 ROBO-ONE on PC優勝者が設計 】
ROBO-ONEという二足歩行ロボット大会の中で、ROBO-ONE on PCというシミュレーション大会が年1回開催されています。この大会ではロボットのCAD設計、構造解析、制御アルゴリズム設計、シミュレーションを行います。
本ソフトウェアはこのon PCで二度優勝したことのある杉浦が開発しています。
(注1)平行リンク等の、閉リンク構造はシミュレーションが安定致しません。
お問い合わせ
株式会社テクノロード
